positioning and rotating pivoting tool, on robot arm
Hi.
I am new to final IK. so hoping someone can just point me in the right direction (which final IK tools you would use).
I am rigging a robot which has 2 main control buttons which are used to position a tool on a robotic arm.
The bottom button is moved to position the tip of the tool (that defines the tools pivot point xyz position) :  The top button is moved to rotate the tool around that pivot point, without changing its position:
The top button is moved to rotate the tool around that pivot point, without changing its position:  I have used hinge joints for the main part of the arm, and that all works OK.
I have used hinge joints for the main part of the arm, and that all works OK.
But not sure how set up the rig to make the arm (tool/hand) rotate around the lower point. Final IK has so many tools, I would love to hear some advice on which tools you would use to rig this movement, and what shape you would make the IK skeleton.
This is what my current IK looks like... No idea if I am on the right track.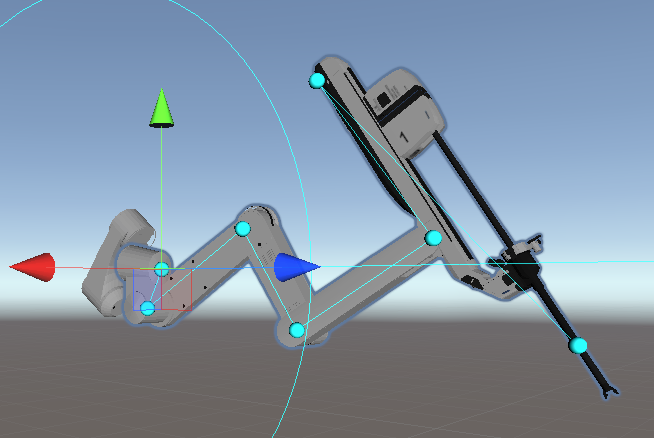

{kind=link}
{kind=link}
{kind=link}
{kind=link}