Hingejoint 3D Limits headache
Hello everybody, I am facing a problem I can't manage to solve with the hinge joints limits.
I am using a hinge joint to simulate an arm rotating around a cylinder. This arm is supposed to reach predefined positions around the cylinder, using a motor and setting limits to the joint depending on its actual position. For example, lets take the following configuration : - The arm is at the position of -105° around the cylinder - At the angle, the achievable positions are -90° and +74 °
I tried to build a quick mockup in the following sketch to make it more easy to understand. 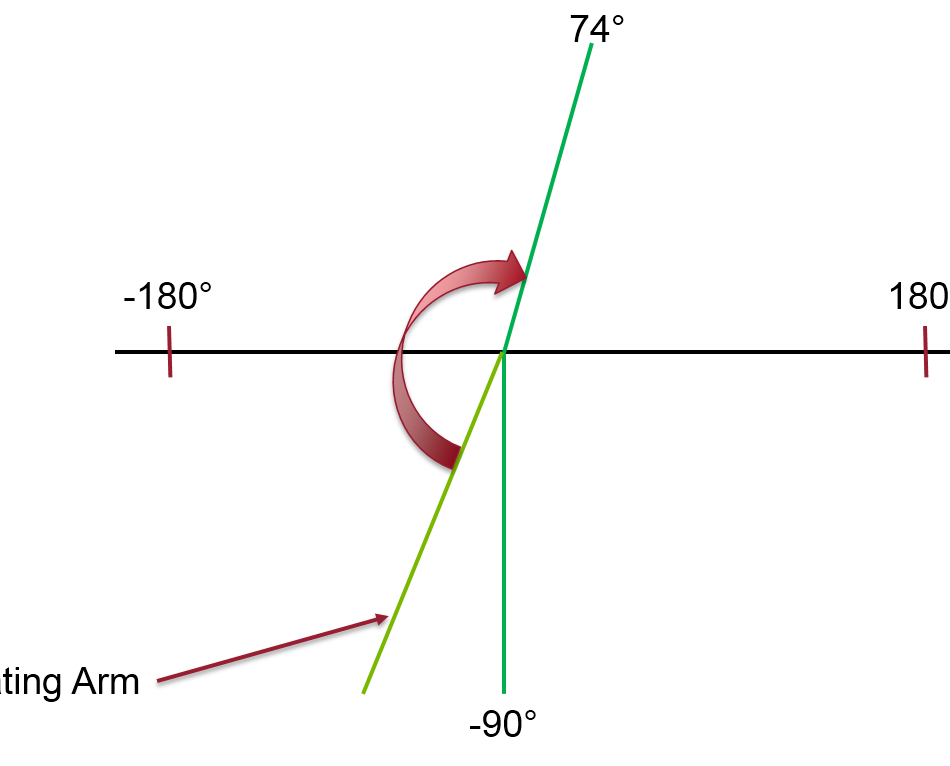
My question is : how can I get to the +74° position from a -105° angle with a negative velocity (i.e going clockwise rather than counter clock wise) ?
Is my approach of using Hingejoints for this kind of behaviour unrelevant ? How could I do that otherwise, knowing that I'd prefer not using transforms for limits detections issues ?
Thanks in advance,

{kind=link}