AddRelativeTorque results in incorrect angular acceleration (Maybe centrifugal force affects)
I did some experiments to test whether the result fits physics if we add torque on the position which is not the center of mass of a rigid body. Therefore I set the environment like this:
You can imagine exerting a torque on an axis which is not the center of mass of a rod.
I use "AddRelativeTorque" function to exert a (0f, 3f, 0f) torque on pivot since it reads "Adds a torque to the rigid body relative to its coordinate system" r1.GetComponent().AddRelativeTorque(new Vector3(0f, 3f, 0f));
I changed the center of mass (it reads "The center of mass relative to the transform's origin.") to Vector3(0f, 0f, 1f) and the Inertia Tensor Identity.
torque=inertia * (angular acceleration) ,inertia =previous inertia +mL^2
Ex: 3=( 1(inertia of y-axis) +2(I set the mass) 1(the center of mass distance to pivot)^2 ) (angular acceleration)
===> angular acceleration of y-axis is expected to be 1
But it turns out the angular acceleration decreases as angular velocity gets higher 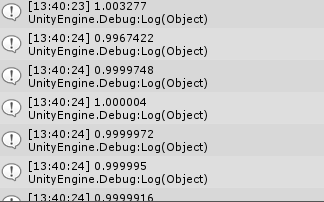 . . .
. . . 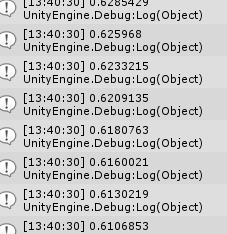 However, if I set the center of mass to the origin, we expect it to be "3", angular acceleration performs correctly.
However, if I set the center of mass to the origin, we expect it to be "3", angular acceleration performs correctly.
Due to the limit of pictures I cannot upload more. However, I can ensure other settings and outcomes reported correctly. "Drag" and "Angular Drag" set to 0.
But due to the physics, centrifugal force does not affect angular acceleration in this situation???

{kind=link}
{kind=link}