My pathfinding code crashes the editor
Hello,
I am making a taxi for my game. What I made so far is a waypoint system and pathfinding for that system.
Today I found out a bug that crashes my entire editor while picking a goal for my taxi. But since my waypoint picking system not working properly too, I am not entirely sure when it actually happens. I can't fix none of these because of this crash. What I suspect is an endless loop in pathfinding code because when I inactive that part, it doesn't crash.
Edit: It crashes at random times whenever I call a_star_search method.
Here's my pathfinding code
PriorityQueue<CarWaypoint> TheQueue; //For priorities
Dictionary<CarWaypoint, CarWaypoint> CameFrom; //For where we came from to the waypoint
Dictionary<CarWaypoint, float> CostSoFar; //Cost so far to this waypoint
private void Start() //Default values
{
TheQueue = new PriorityQueue<CarWaypoint>();
CameFrom = new Dictionary<CarWaypoint, CarWaypoint>();
CostSoFar = new Dictionary<CarWaypoint, float>();
}
private float heuristic(CarWaypoint a, CarWaypoint b, float CostUntil)
{ //Heuristic function to prioritize waypoints
return (a.transform.position - b.transform.position).magnitude + (CostUntil + 1) * 2;
}
public Dictionary<CarWaypoint, CarWaypoint> a_star_search(CarWaypoint start, CarWaypoint goal)
{
TheQueue.Clear(); //Clear the entire queue and clear the variables
CameFrom = new Dictionary<CarWaypoint, CarWaypoint>();
CostSoFar = new Dictionary<CarWaypoint, float>();
TheQueue.Enqueue(start, 1); //Enqueue starting waypoint
CameFrom.Add(start, null);
CostSoFar.Add(start, 0);
CarWaypoint Frontier;
bool Found = false;
do
{
//Get the first value in our prioritized queue
Frontier = TheQueue.Dequeue();
//My waypoint structure includes three different direction types
//1. NextWaypoint, which is directly next one.
//2. Branches, where there is no NextWaypoint and vehicle is entering or exiting a junction
//3. LaneChanges where it's just a lane change on straight roads
//For NextWaypoint
if (Frontier.NextWaypoint != null)
{
CheckFor(Frontier.NextWaypoint, Frontier, goal);
if (Frontier.NextWaypoint == goal) { Found = true; break; }
}
//For Branches
if (Frontier.Branches != null)
{
foreach (CarWaypoint obj in Frontier.Branches)
{
CheckFor(obj, Frontier, goal);
if (obj == goal) { Found = true; break; }
}
}
//For LaneChanges
if (Frontier.LaneChanges != null)
{
foreach (CarWaypoint obj in Frontier.LaneChanges)
{
CheckFor(obj, Frontier, goal);
if (obj == goal) { Found = true; break; }
}
}
} while (Frontier != null && Frontier != goal && !Found);
//Loop broken. Either it's been found or not found and finished the entire waypoint system..
if (Frontier == goal || Found) //Did we found it?
{
//Go back from the goal and find the start
Dictionary<CarWaypoint, CarWaypoint> Path = new Dictionary<CarWaypoint, CarWaypoint>();
CarWaypoint Last = goal;
while (Last != start)
{
Path.Add(CameFrom[Last], Last);
Last = CameFrom[Last];
}
Debug.Log("Path found");
return Path;
}
else
{
Debug.Log("Path not found");
return null;
}
}
//This function is to check a waypoint, how close it is to the goal and prioritize it accordingly.
private void CheckFor(CarWaypoint Checking, CarWaypoint Current, CarWaypoint Goal)
{
TheQueue.Enqueue(Checking, heuristic(Checking, Goal, CostSoFar[Current]));
//Save cost so far and where it came from.
//Did we arrive at this waypoint before?
if (CameFrom.ContainsKey(Checking)) //Yes?
{
//Check at the cost
if (CostSoFar[Checking] > CostSoFar[Current] + 1)
{
//If current cost is better, replace old data with current one
CameFrom[Checking] = Current;
CostSoFar[Checking] = CostSoFar[Current] + 1;
}
}
else //If not, just write the values down
{
CameFrom.Add(Checking, Current);
CostSoFar.Add(Checking, CostSoFar[Current] + 1);
}
}
A few images to help you understand the structure 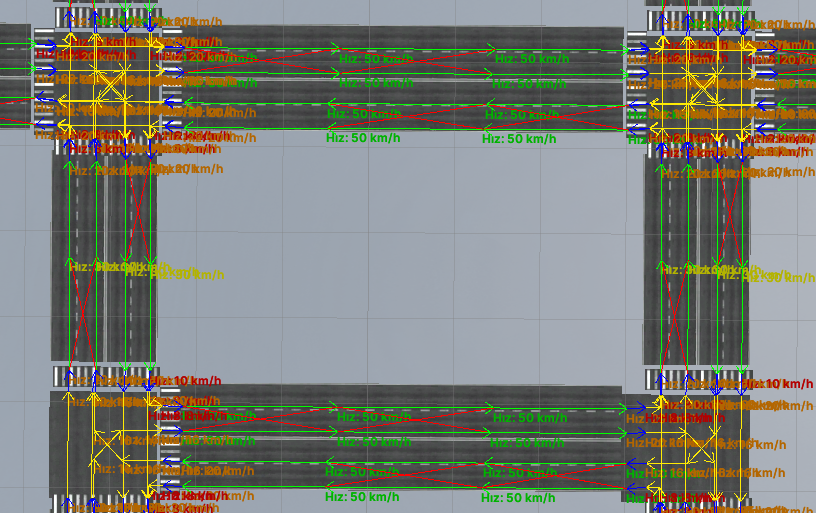 Waypoints structure over 3D world
Waypoints structure over 3D world
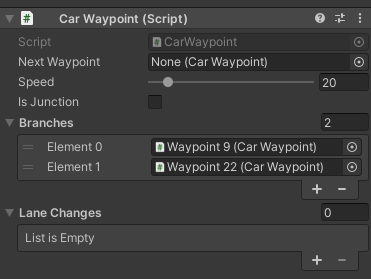 Waypoint class structure
Waypoint class structure
I currently can't reproduce error so what I did might be the solution so noting it down. Instead of enqueueing every time, I only enqueued passing waypoint if it's our first visit to that one. I will write it down as a solution if I don't encounter with this bug again.
Apparently in my code, I enqueued the ones I enqueued before. That sometimes put my code into an endless loop. To fix this, I fixed my CheckFor method accordingly:
private void CheckFor(CarWaypoint Checking, CarWaypoint Current, CarWaypoint Goal)
{
//Save cost so far and where it came from.
//Did we arrive at this waypoint before?
if (CameFrom.ContainsKey(Checking)) //Yes?
{
//Check at the cost
if (CostSoFar[Checking] > CostSoFar[Current] + 1)
{
//If current cost is better, replace old data with current one
CameFrom[Checking] = Current;
CostSoFar[Checking] = CostSoFar[Current] + 1;
}
}
else //If not, just write the values down
{
CameFrom.Add(Checking, Current);
CostSoFar.Add(Checking, CostSoFar[Current] + 1);
TheQueue.Enqueue(Checking, heuristic(Checking, Goal, CostSoFar[Current]));
}
}

{kind=link}
{kind=link}