Can't estabilish connection between ROS and Unity
Hi everyone,
I'm trying to estabilish a connection between ROS and unity using https://github.com/Unity-Technologies/ROS-TCP-Connector . I've followed the tutorial steps in https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/ros_unity_integration/README.md but after installing the package ros-tcp-connector package via git url in unity (2021.1.6f1) I'm not able to set UNITY_IP for connection. When I open Robotics -> Ros Settings in unity I haven't option to override/set it.
Attached photo of Robotics -> Ros Settings window: 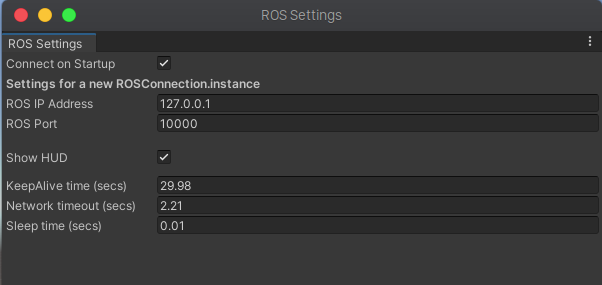
For more information I'm trying to connect an urdf charged Baxter Robot in unity and using ROS noetic. Thanks in advance.
You might want to post your question to the dedicated robotics forums as recommended by the github repo: https://forum.unity.com/forums/robotics.623/

{kind=link}