Need Help! How to give a command from ROS to robot?
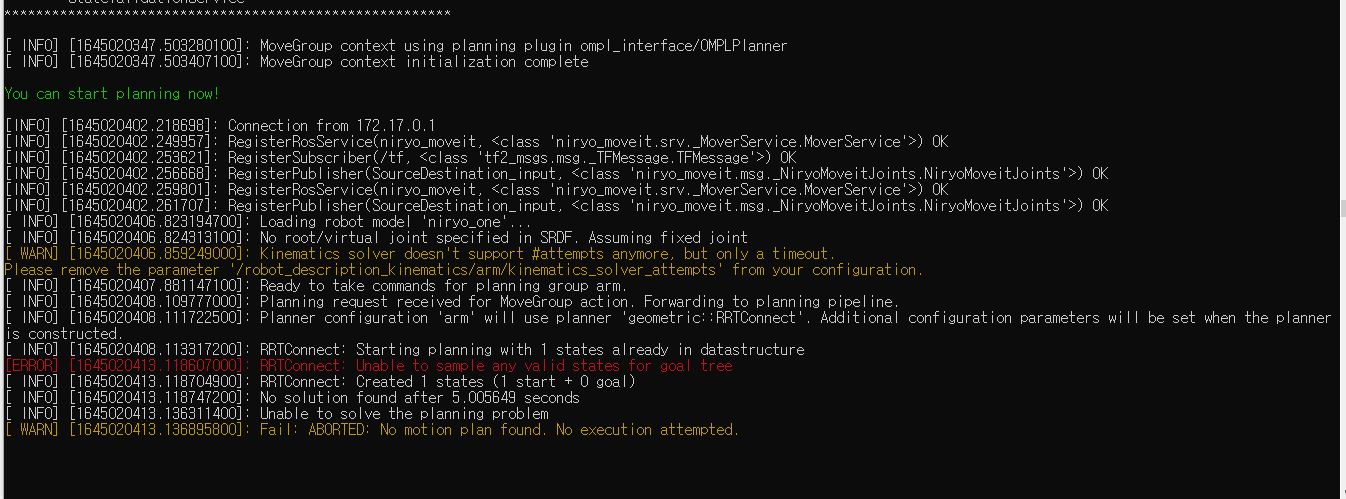
Currently Unity is connected to ROS, successfully. I have tried to invoke a motion planning service in ROS, moving a Unity Articulation Body based on the calculated trajectory. However, the error is occurred during invoking a motion planning service in ROS. The error is written as "RRTConnect: Unable to sample any valid states for goal tree" Please check out the error screen shot below for your reference and give comments to fix the problem. Please take a look at the image below.
@hyounesy Here is the tutorial link that I was trying to follow. I got stuck while I was following the steps in Part3. Please check out the link below. https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/pick_and_place/3_pick_and_place.md

{kind=link}
{kind=link}