How can I pick up an object with a gripper?
So i have this gripper that I have made: 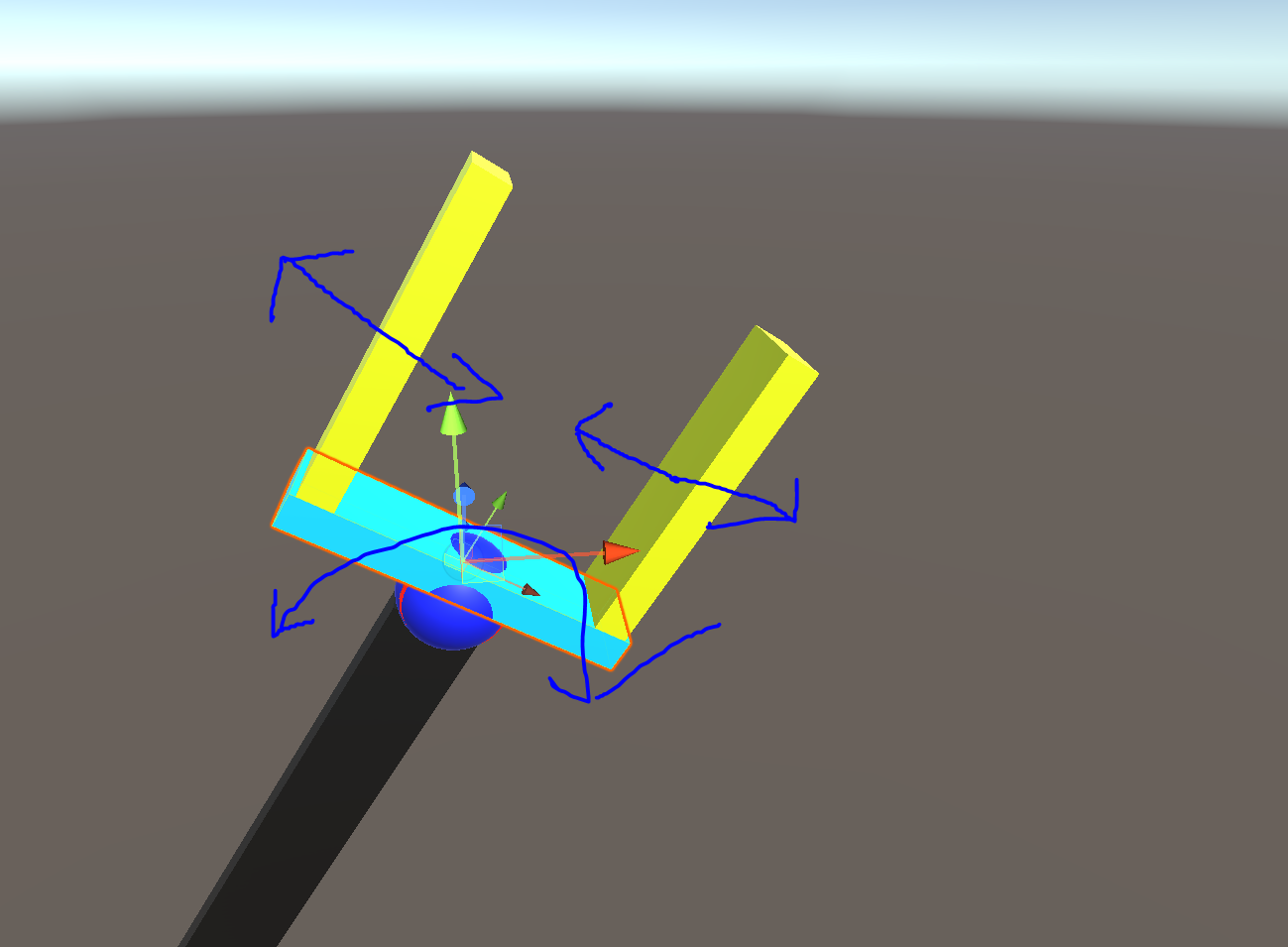
as you can see the yellow part(the fingers) move along the x-axis and the whole thing(the gripper including the blue and yellow) rotates.
I want to be able to pick up objects with this.
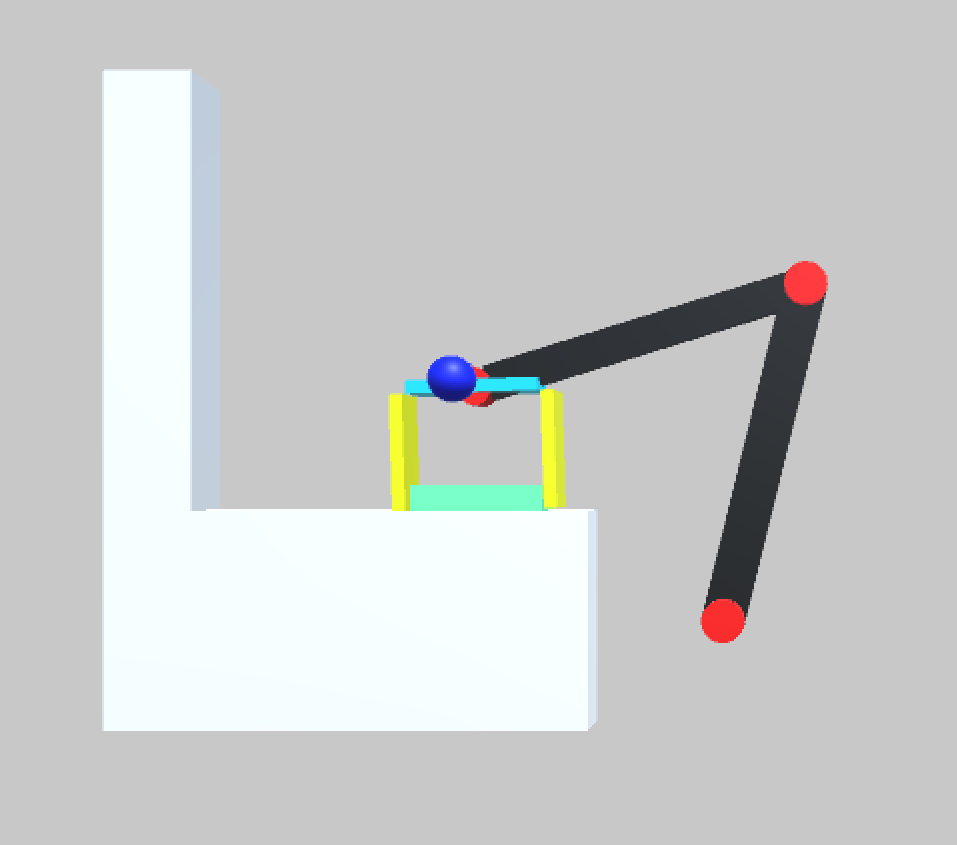
But all the time the gripper just go through the object or the object bounce up ward because of the collision. I tried using body articulation but the problem with that was it fights the rotation and the movement script of the gripper so it just wiggles and does not move.
What can I do to make this into like a claw machine, I was thinking making the yellow part sticky? but then not only I do not know how to do it but it might not be able to drop the object which it should.
What can I do? Thanks!

{kind=link}
{kind=link}