The question is answered, right answer was accepted
Clueless about rigidbody based legs...
Hello everyone!
I would like to make a physics based walker. Simple concept, legs would affect the upper body of this four legged thing. With hinge joints, it works, kinda stable with big, wide feet. The problem is that how should I move the legs? I tried using hinge joint's motor, but I have no idea, how should I have more control over it. It would be good if I could animate it.
I also thought about using just a foot that's somehow remotely connected to a body and there would be the leg between them somehow with inverse kinematic. The leg would be controlled by the rigidbody foot, the leg itself would not be physics driven. But it's again, theoretical, and I don't know, how should I animate the foot's movement path and how it could push up the whole body.
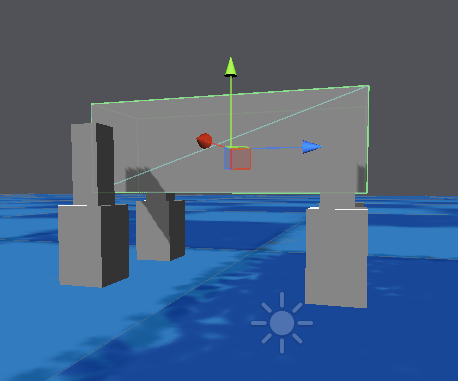
They are all hinge jointed
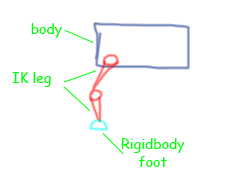
IK foot
Things like instability and control are not important now. Just I can't figure out, how should I move the legs in a specific way that works with physics right.
{kind=link}
{kind=link}
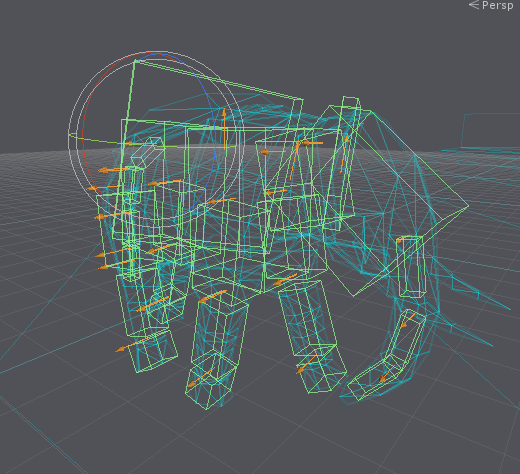
I got it! I use spring and limits. Spring is around 500-2000, damping set to pretty low (1-30). I programmed the target positions with a script. And my walker can walk, it has joints for the feet too. It's not the most stable thing, but it works well.
{kind=link}