Calculating the difference between forward direction and velocity direction to set the body roll of my vehicle.
Hi all,
As a relatively new Unity developer I'm having trouble coming up with a solution, possibly due to my vague understanding of the relationship between quaternions and euler angles.
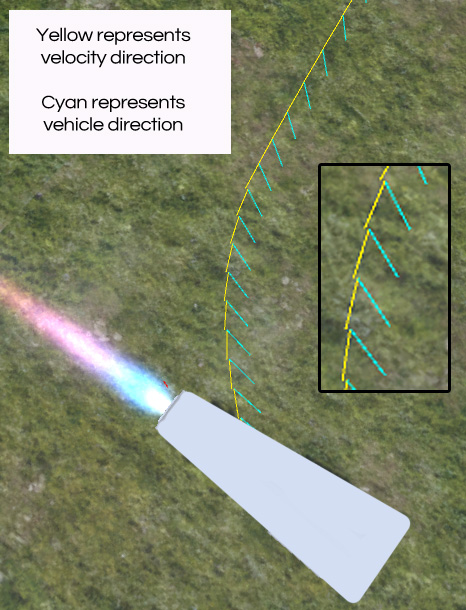
Adding body roll to the model of my vehicle by calculating the difference in y angle between the angle the vehicle is facing and the direction of velocity/momentum. By adding it to the model instead of the parent/controlling object I was hoping to avoid over-complicating the steering process.
Currently my pseudo-code for this: (Code at its most basic level, disregarding euler to quaternion.)
rollAngle = ( parent.forward.y - parent.rigidbody.velocity.y ) / 2;
transform.eulerAngle = new Vector3 (0, 0, rollAngle);
Should mean that when the direction of the vehicle is perpendicular to its momentum on the y-axis it will produce a 45 degree body roll.
So to sum up, I'm looking to take the y rotation of my object and subtract the y rotation of its velocity divide the value by two and then use it to add body roll to my object on the z axis. I think I need to convert both to eulerAngles and subtract them that way, but I haven't yet discovered a way to do so.
Thanks for taking the time to help me out!
Your code looks like its does ALMOST exactly this: "To to sum up, I'm looking to take the y rotation of my object and subtract the y rotation of its velocity divide the value by two and then use it to add body roll to my object on the z axis. "
With the one exception: you are REPLACING the rotation of the object with this, rather than adding to it.
transform.eulerAngle = new Vector3 (0, 0, rollAngle);
If you wish to rotate the existing orientation, by that angle try something likethis:
transform.rotation = transform.rotation * Quaternion.Euler(0, 0, rollAngle);
(it uses this operator to combine the rotatations: http://docs.unity3d.com/ScriptReference/Quaternion-operator_multiply.html)
Edit: note-the above operator "adds" the second Quaternion to the First. If you wish to reverse the rotation of the second Quaternion to do a "subtraction", use http://docs.unity3d.com/ScriptReference/Quaternion.Inverse.html ,like so:
transform.rotation = transform.rotation * Quaternion.Inverse(Quaternion.Euler(0, 0, rollAngle));
(silly in this case, because you could have just used rollAngle * -1 to begin with)
Thank you for the tip, but I feel like you haven't fully understood what I'm trying to do.
$$anonymous$$y issue isn't with adding the rollAngle to my object, it's with calculating the rollAngle.
I am indeed NOT quite clear on what the problem is.
Is this the part you are having trouble with: " calculating the difference in y angle between the angle the vehicle is facing and the direction of velocity/momentum."?
If so, you should be able to use http://docs.unity3d.com/ScriptReference/Vector3.Angle.html, which takes two vectors, and returns the angle between them. Sounds like you might want to trim the input vectors and set their Z coordinate to 0, assu$$anonymous$$g you only want the angle on the XY plane.
Thanks, that might be exactly what I'm looking for.
Edit: Got it working;
private Vector3 eulerAngles;
private Vector3 velocityVec;
private Vector3 forwardVec;
public float angle;
private int cross;
velocityVec= transform.parent.GetComponent<Rigidbody>().velocity.normalized;
velocityVec.y = 0;
forwardVec= transform.parent.forward.normalized;
forwardVec.y = 0;
angle = Vector3.Angle(velocityVec, forwardVec);
cross = Vector3.Cross(velocityVec, forwardVec).y < 0 ? 1 : -1;
angle = $$anonymous$$athf.Clamp(angle, -45, 45); //Clamp to stop it over-rolling on sharp turns
eulerAngles = new Vector3(transform.parent.rotation.eulerAngles.x, transform.parent.rotation.eulerAngles.y, cross*angle);
transform.eulerAngles = eulerAngles;

{kind=link}