How to fix this error during invoke a robot movement in ROS ?
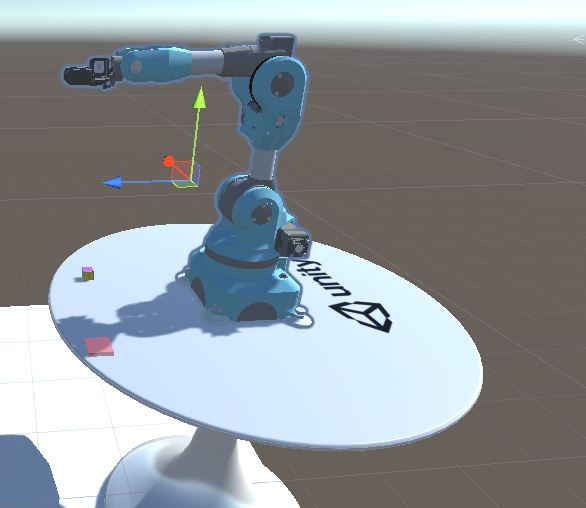
Unity is successfully connected to ROS. I have tried to invoke a motion planning service in ROS, moving a Unity Articulation Body based on the calculated trajectory. However, the error is occured during invoking a motion planning service in ROS. The error is written as "RRTConnect: Unable to sample any valid states for goal tree" Please check out the error screen shot below for your reference and give comments to fix the problem.
Here is the tutorial link that I was trying to follow. I got stuck while I was following the steps in Part3. Please check out the link below. https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/pick_and_place/3_pick_and_place.md 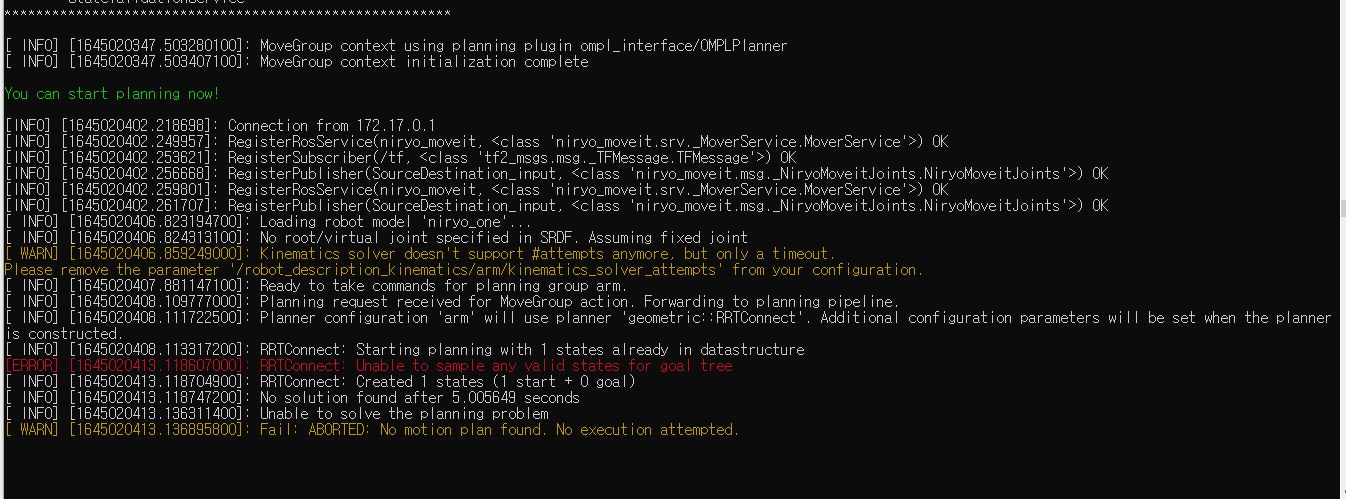

{kind=link}
{kind=link}